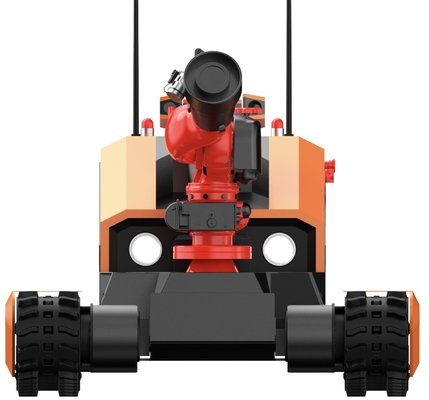
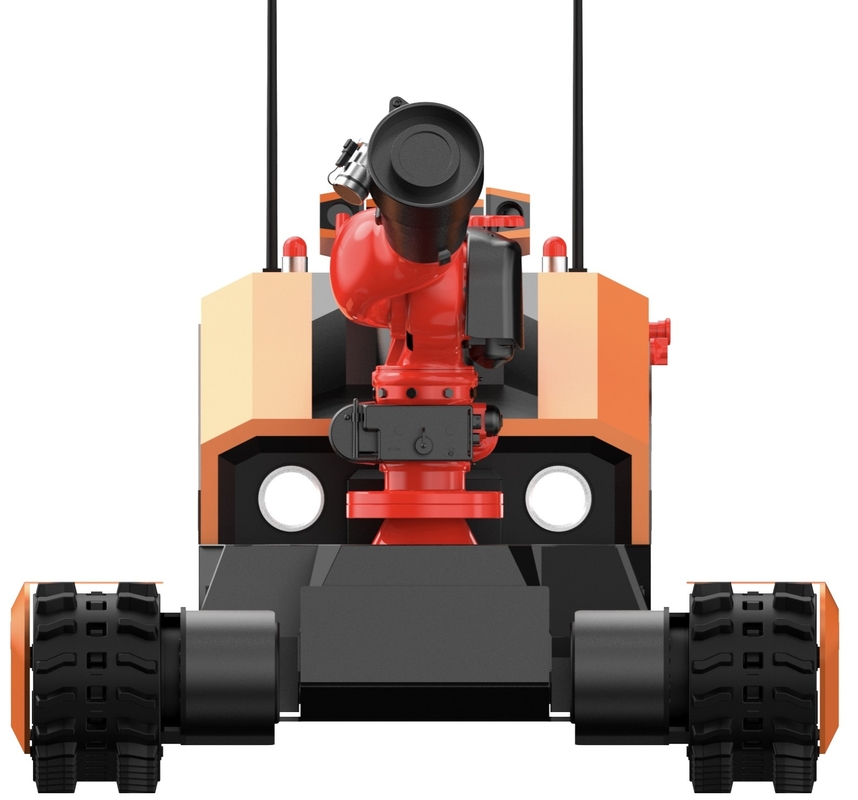
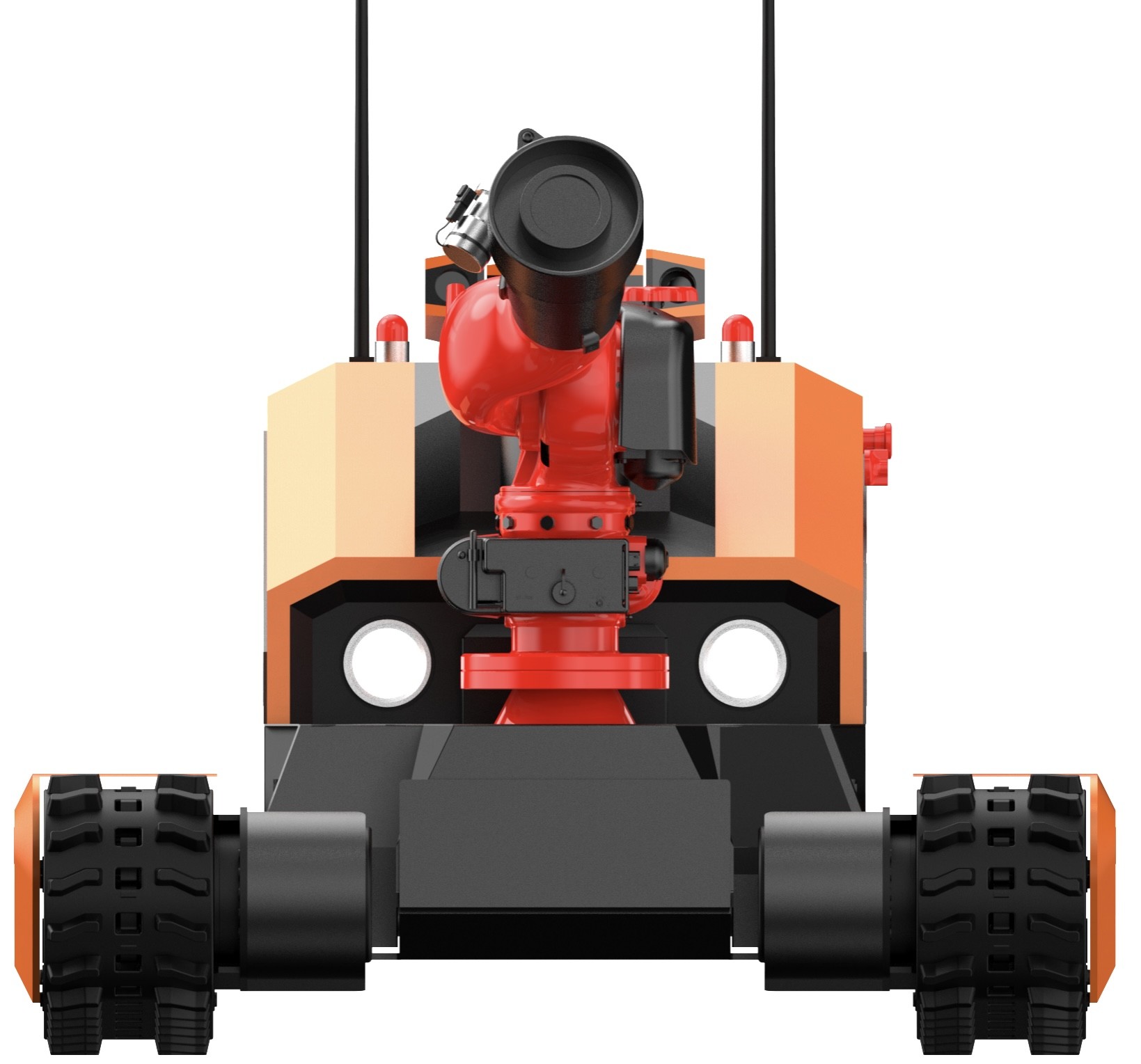
3.1 Montage du robot
- Nom: Robot à quatre voies de lutte contre les incendies et de reconnaissance
- Modèle: RXR-MC120BGD
- Fonctions de base: Utilisé pour transporter plusieurs dispositifs ou équipements et fournitures de sauvetage.
- Conformité aux normes de l'industrie du feu: "GA 892.1-2010 Robots de lutte contre les incendies - Partie 1: Exigences techniques générales"
- Conformité avec les normes de résistance à l'explosion: GB3836.1 2010 "Atmosphères explosives - Partie 1: Équipement - Exigences générales", conforme à GB3836.1-2010 "Atmosphères explosives - Partie 2:Équipement protégé par des boîtiers ignifuges" et GB3836.4 2010 "Atmosphères explosives - Partie 4: équipements protégés par une sécurité intrinsèque".
- Type à l'épreuve des explosions: Toute la machine: Exd[ib]IIBT4Gb, Dispositif alimenté par batterie au lithium: Ex d IIC T6 Gb
- Grade de protection: le grade de protection du corps du robot est IP66 et le grade de protection de la partie supérieure du robot est IP67.
- Puissance: batterie au lithium électrique ternaire
- Dimensions: longueur 1990 mm * largeur 1190 mm * hauteur 1190 mm (à l'exclusion des joints universels, des pièces à chute automatique et des antennes)
- Poids: ≤ 1200 kg
- Force de traction: ≥ 10KN
- Distance de remorquage: ≥ 120 m (remorquage de quatre tuyaux d'eau remplis DN80)
- Vitesse linéaire maximale: ≥ 2 m/s, régulation de vitesse sans pas par télécommande
- Déviation de ligne droite: ≤ 3%
- Distance de freinage: ≤ 0,3 m (à basse vitesse)
- Capacité d'escalade: ≥ 42°
- Hauteur du passage d'obstacle: 600 mm
- L'inclinaison latérale, angle de stabilité: 45°
- Profondeur de l'enroulement: ≥ 500 mm
- Durée de marche continue: 2 heures
- Temps de travail fiable: passé le test de stabilité et de fiabilité continue de 16 heures.
- Distance de commande à distance: ≥ 1000 m
- Distance de transmission vidéo: ≥ 1000 m
- Fonction de surveillance panoramique: peut afficher à distance l'image à 360 degrés du corps du robot.
- Fonction d'affichage de l'attitude: détection en temps réel de l'angle d'inclinaison et de roulement du robot, permettant aux opérateurs de maîtriser l'état du robot en temps réel.Les valeurs sont transmises au terminal de télécommande pour une commande et un fonctionnement corrects à l'étape suivante.
- Fonction autonome d'évitement des obstacles: lorsqu'un obstacle est détecté à une distance de 2 mètres devant, la vitesse est réduite de moitié; lorsqu'un obstacle est détecté à une distance de 1 mètre,le robot arrête automatiquement de avancer.
- Fonction de pulvérisation et de refroidissement automatiques: équipé d'un rideau d'eau à trois couches, conception d'auto-pulvérisation et de refroidissement, qui pulvérisent et refroidissent le corps du robot,formant un rideau d'eau couvrant l'ensemble du robot. Cela garantit que la batterie, le moteur, le système de commande et les composants clés du robot peuvent fonctionner normalement dans des environnements à haute température.
- Génération d'énergie automatique et fonction de suppression automatique du recul: le moteur principal du robot utilise un freinage régénérateur,conversion de la force de recul en énergie électrique lors de la pulvérisation d'eau pour l'extinction d'incendie.
- Traces du robot: les traces utilisées pour le robot de lutte contre les incendies sont en caoutchouc composite de haute qualité; l'intérieur des traces est un squelette métallique; il a une conception de protection anti-déraillement de la piste.
- Terminal de commande: terminal de commande à distance graphique et de données intégré portatif
3.2 Système de lutte contre les incendies robotisé
- Moniteur d'incendie: Moniteur d'incendie importé
- Types d'agents d'extinction d'incendie: eau ou mousse
- Matériau: Corps de moniteur - acier inoxydable
- Pression de fonctionnement (Mpa): 1.2
- Mode de pulvérisation: courant continu et atomisation, réglable en continu
- Taux de débit: 120 L/s
- Distances (m): ≥ 100
- L'angle de rotation: horizontale -90° - 90°, verticale 0° - 90°
- Angle de pulvérisation maximal: 120°
- Caméra de suivi: équipée d'une caméra de suivi pour le moniteur d'incendie.
- Pipe de surveillance de mousse: le tuyau de mousse peut être remplacé, et la méthode de remplacement est le plug-in rapide.et peut basculer entre les modes courant continu et pulvérisation.
3.3 Système de reconnaissance robotique
En configurant des instruments de gaz, des modules de surveillance de l'environnement, des caméras infrarouges, des appareils thermiques infrarouges (facultatif), des capteurs et d'autres équipements embarqués,Il peut reconnaître à distance les gaz toxiques et nocifsUne plateforme de levage à l'épreuve de l'explosion est configurée pour transporter des capteurs et des caméras de détection de l'environnement,permettant la détection et l'analyse de gaz toxiques et combustibles, audio et vidéo, et l'environnement à différentes hauteurs sur le site.
- Configuration du système de reconnaissance: 4 caméras infrarouges à l'épreuve de l'explosion embarquées, 1 caméra thermique (facultative), 1 détecteur multiparamètres et 1 détecteur de température et d'humidité.
- 360° de rotation et de levage à l'épreuve de l'explosion: angle de rotation 360°; angle d'inclinaison ±90°; hauteur de levage: hauteur initiale: 1190 mm, hauteur après levage: 1990 mm
- Module de détection de gaz et de détection environnementale: équipé d'un système de détection rapide sans fil de sauvetage d'urgence et d'un détecteur de température et d'humidité.
- Fonction de mesure de la température infrarouge:Les capteurs de température infrarouges sont respectivement équipés à l'intérieur et à l'extérieur du véhicule pour surveiller la température interne de la carrosserie du véhicule et la température sur place (-50 - 350°C)..
3.4 Robots de détection vidéo et audio
- Nombre et configuration des caméras: le système vidéo se compose de 4 caméras infrarouges fixes haute définition sur le corps, permettant l'observation de la ligne de vue avant et arrière.
- Illuminance de la caméra: Les caméras sur le corps peuvent fournir des images claires sous une faible luminosité de 0,001LUX, avec une fonction anti-tremblement dynamique.Les caméras doivent être capables de capturer efficacement et clairement la situation sur place, même dans des conditions d'éclairage nul, et de l'afficher sur l'écran en cristaux liquides du terminal d'exploitation..
- Pixel de l'appareil photo: Million d'images haute définition, avec une résolution de 1080P et un grand angle de 60°.
- Grade de protection des caméras: IP68
- Exigences techniques de collecte du son: il peut recueillir à distance des sons sur place pour faciliter la compréhension de la situation des personnes piégées.la plage de fréquences est de 20 Hz - 20 kHz, et la sensibilité est ≥ 40 dB.
- Un appareil d'imagerie thermique infrarouge (facultatif): équipé d'un appareil d'imagerie thermique infrarouge pour détecter et suivre les sources de chaleur; l'appareil d'imagerie thermique infrarouge a une fonction d'anti-tremblement de l'image;il a la fonction de collecte d'images et de transmission en temps réel; il dispose d'une fonction de recherche visuelle de source d'incendie.
3.5 Paramètres de configuration du terminal de télécommande
- Dimensions: 41031070 mm (hors hauteur du joystick)
- Poids total: 6,5 kg
- Écran d'affichage: écran en cristaux liquides de haute luminosité d'au moins 10 pouces, avec commutation de signal vidéo à 4 canaux.
- Plateforme du système de contrôle: Système d'exploitation Windows 7
- Heures de travail: 8h
- Fonctions de base: la télécommande et le moniteur sont intégrés dans une conception portable, équipée d'une épaule ergonomie; elle peut être utilisée pour visualiser et contrôler simultanément,présentant de manière stable les images de l'environnement environnant du site aux opérateurs distantsIl peut afficher l'état de la batterie, l'angle de pente du robot, l'état de l'angle d'azimut et les informations d'alarme des concentrations de gaz toxiques et nocifs en temps réel, et contrôler le robot pour avancer,en arrière, tourner, etc. Il peut également contrôler le moniteur de feu pour se déplacer vers le haut, vers le bas, à gauche, à droite, basculer entre le courant continu et l'atomisation, et effectuer des actions d'auto-oscillation.Il a la fonction de collecter et de transmettre en temps réel les images de l'avantLa méthode de transmission des données est la transmission sans fil à l'aide de signaux cryptés.
- Fonction de surveillance panoramique: peut afficher l'image à 360 degrés du corps du robot en temps réel.
- Fonction d'enregistrement et de lecture vidéo: peut enregistrer des vidéos à tout moment. Le contenu vidéo enregistré est automatiquement enregistré et peut être lu directement sur le terminal de télécommande.La vidéo peut également être copiée sur d'autres appareils.
- Fonction de projection d'écran: peut être connecté à un dispositif de projection tel qu'un projecteur via une interface HDMI, ce qui est pratique pour les commandants d'opération pour discuter et prendre des décisions ensemble.
- Fonction de contrôle du mouvement: grâce à un joystick industriel à trois axes, le robot peut être manipulé de manière flexible pour avancer, reculer, tourner à gauche et tourner à droite.
- Fonction de commande du moniteur d'incendie: grâce à un joystick industriel à trois axes, le moniteur d'incendie peut être contrôlé pour se déplacer vers le haut, vers le bas, à gauche, à droite, basculer entre le courant continu et l'atomisation.
- Commutateur de commande pour le levage du système de reconnaissance: réalisé par un commutateur instantané à auto-réinitialisation.
- Commutateur vidéo: réalisé par un commutateur instantané à réinitialisation automatique.
- Commutateur de commande pour la fonction de remorquage automatique du tuyau d'eau: réalisé par un commutateur momentané à auto-réinitialisation.
- Fonction de commande de l'illuminateur: réalisée par un interrupteur momentané de réinitialisation automatique, et l'ordinateur hôte fait une réponse de blocage automatique.
- Outils auxiliaires: ceinture d'épaule pour le terminal de télécommande portatif, trépied mobile
|






























 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!